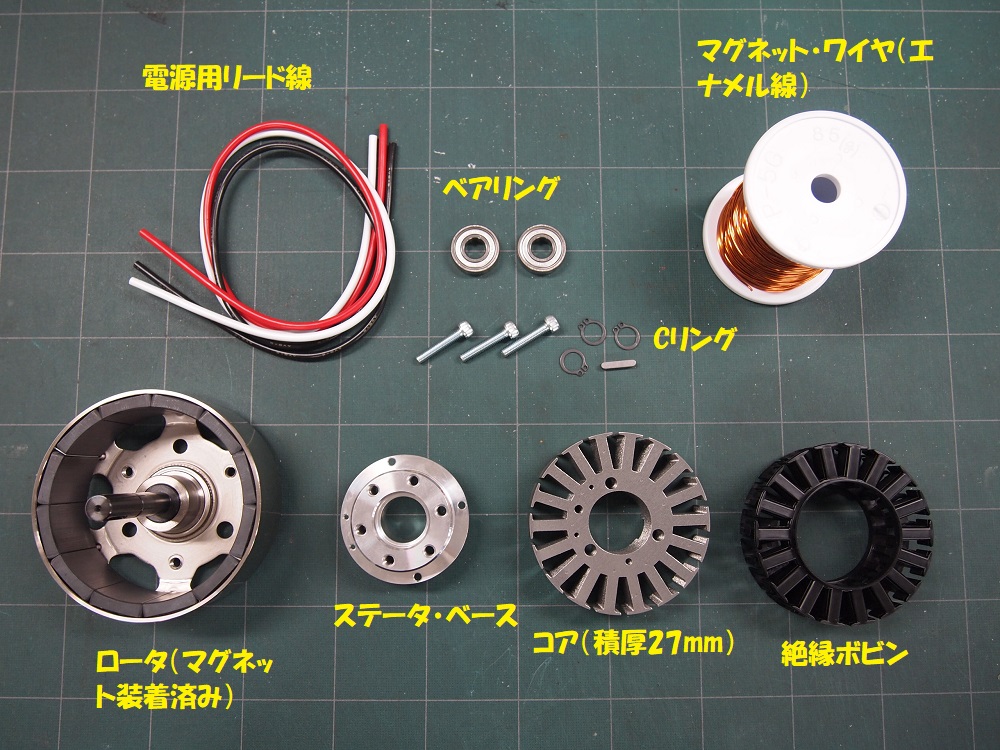
●キットのモータはコイルを手巻きして作る
自分でコイルを巻いて,モータを製作します.手順を守れば誰でも作れます.必要な道具ははんだこてだけです.
巻く回数(ターン数)や結線方式(2直3並や3直2並,6並など)によってモータの特性が変わります.巻き直すことも可能なので,特性の変化を調べられます.
本やウェブ・ページで見ても,モータの理解は難しいものですが,実際に自分で巻いてみると電磁力によってモータが回る仕組みを感覚的に捉えられると思います.
モータの原理や特性,制御方法について詳しくはInterface誌を参考にしてください.
ブラシレス・モータの原理や巻き線による特性変化についてはCQ出版のセミナーでも学べます.
●EVカートで使っているモータについて
カート用のモータはDCブラシレス・モータ
EVカートで使用するのはDCブラシレス・モータです.
DCブラシレス・モータを理解するには,DCブラシ付きモータやACモータについて見てみるのが近道です.
・モータ1:DCブラシ付きモータ
DCは直流(Direct Current)という意味です.乾電池や自動車用の鉛バッテリなどを電源として使います.
「ブラシ付き」というのは,文字通りブラシが付いているという意味です.ブラシの役割は,モータの回転に伴ってコイルに流す電流の向きを変えることです.
モータを回し続けるためには,回転に合わせて次々と電流の向きを反転し続けなければなりません.ブラシがこの作業を行ってくれるので,DCブラシ付きモータ(あるいは単にDCモータとも呼ぶ)は直流電流を与えるだけで回すことができます.
モータの回転数の制御は,供給する電圧によって行います.
・モータ2:ACモータ
AC(Alternative Current)は交流という意味です.ACモータにはブラシは付いていません.電源が交流なので,ブラシによって電流の向きを変える必要がないためです.
ブラシは必要ありませんが,回転するコイルに電流を流すためにはスリップリングが必要です.通常ACモータでは,スリップリングも省くために,コイル側ではなく,磁石側を回転させます.
・モータ3:DCブラシレス・モータ
文字通りブラシが付いていないモータです.
そのため,直流電流を与えただけでは回りません.何らかの方法によってモータの回転に合わせてコイルに流す電流の向きを変える必要があります.
通常は,センサとマイコンおよび増幅回路を使ってこの作業を行います.以下スタンダードな構成で説明します(当然他の方式もあります).
モータの内部には回転するロータがあります.ロータの機械角は当然1回転で360°です.多くのモータは3相モータですので,3つのコイルがあれば回るのですが,実際のモータは12個や18個のコイルを持っています(18スロット).18個コイルがあると機械角で1回転する内に,6回UVWのサイクルがあります.UVW1サイクルが電気角の360°です.
この電気角360°の中で現在どの位置なのかを知るためにホール・センサを使います.ホール・センサの信号を受け取ったマイコンは,ロータの現在の位置に合わせてモータのコイルに流す電流を制御します.この場合でもやはり,モータが回り続ける限り,コイルに流す電流の向きは連続的に反転させることになります(詳細はInterface誌2022年2月号のブラシレス・モータを回すプログラムの書き方講座を参照してください).
マイコンはモータのコイルへ流すような大電流を直接扱えないため,増幅回路と合わせたドライブ回路(インバータとも言う)を使用します.つまり現実には,マイコンはドライブ回路を制御します.マイコンでどのように制御するかは,マイコンに書き込むプログラムによって変えられます.このプログラムは主にC言語かC++言語で記述されます.
ドライブ回路から電流を受けてDCブラシレス・モータは回転します.
コイルに流す電流の向きや大きさは,マイコンのプログラムによって変えられます.従ってモータの回転数もプログラムで制御できます.
キットでは,Nucleo STM32F302R8(STマイクロエレクトロニクス)というマイコン・ボードを使っています.このマイコンのプログラムは,パソコンとウェブ・ブラウザがあれば変更できます(mbedというプログラミング・フレームワークを使います).基本のプログラムを変更したり,自分で新しくプログラムを作りながら,DCブラシレス・モータの制御を学べます.
制御方式を大別すると,矩形波駆動,正弦波駆動,ベクトル制御があります.それぞれ制御性や電力効率が違います.プログラムの変更によって回生ブレーキを実現することもできます.