演習テーマ:電動車両モデルの構築
電動車両開発に向けた機械・電気・制御(ソフトウエア)の要素技術とそれらの融合技術であるメカトロニクス技術の基礎を学ぶ
内容:
メンバ5名のグループ(6グループ)を一単位として以下の内容を順を追って実施し、レポートの提出やプレゼンを課している。
・基礎演習
・電動車両モデルの基本設計
・数式モデルの作成
・シミュレーション
・制御ソフトウエア作成
・GUIの作成
・実機試験
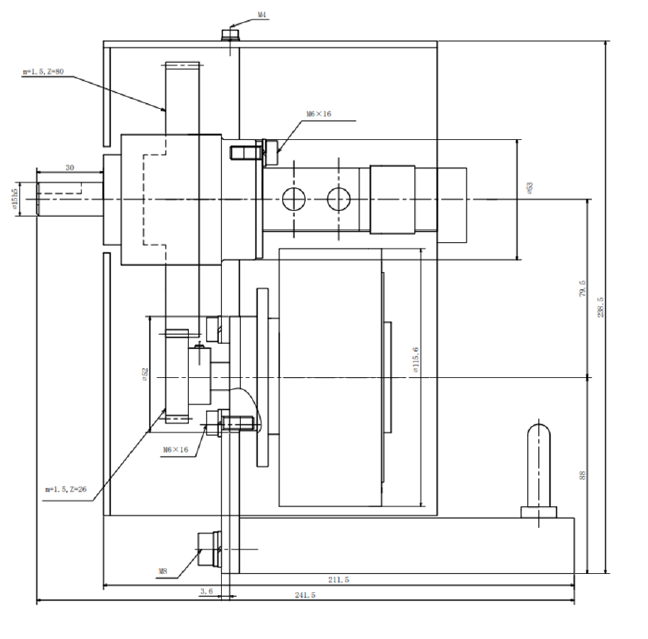
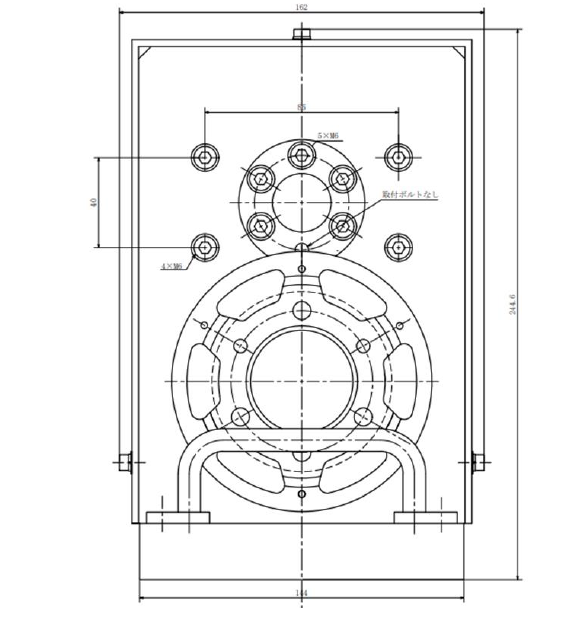
演習 機械1:
機械部品のスケッチを行い、計画図面を作成する。
(リバースエンジニアリング)
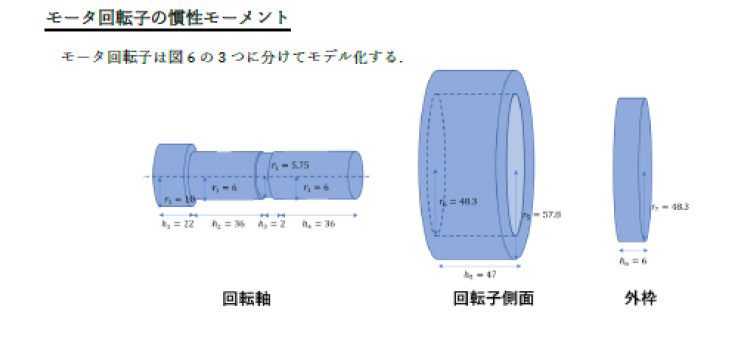
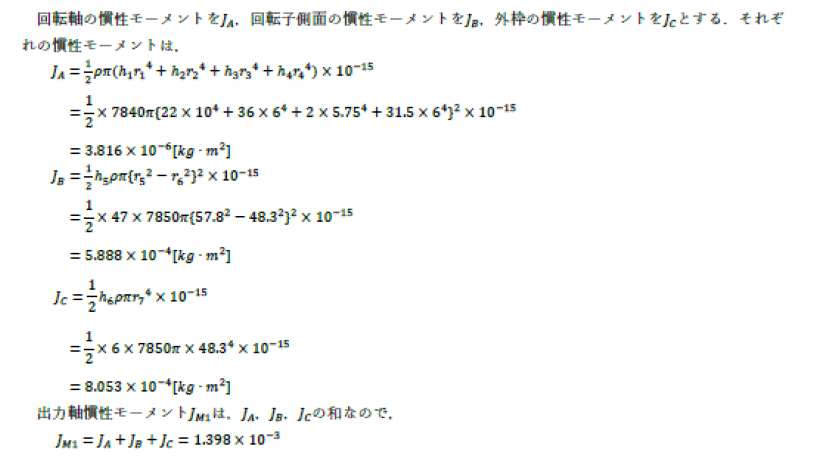
演習 機械2:
モータ回転部の寸法や材質情報からモータの慣性
モーメントを計算する。
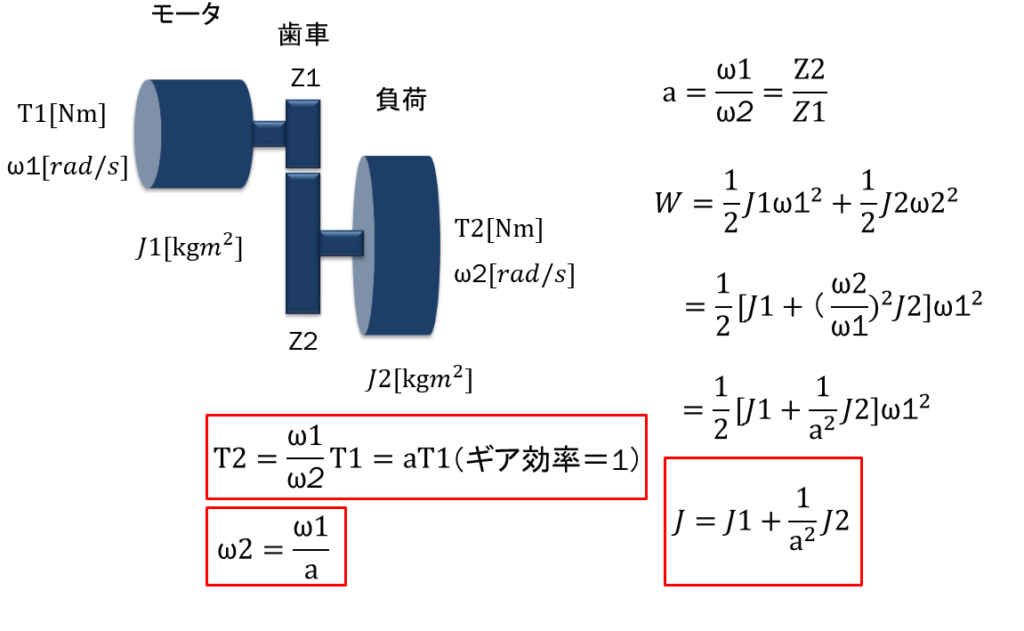
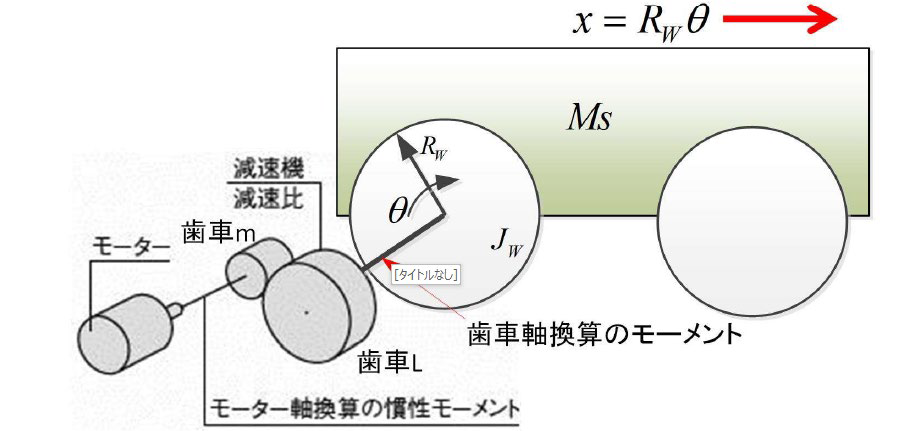
演習 機械3:
モータ駆動系
(ギアを含む)のトルク、回転角速度、モータ軸換算慣性モーメントを計算する。
演習 電気1:
モータ数式モデルを得るためのモータ定数を求める。
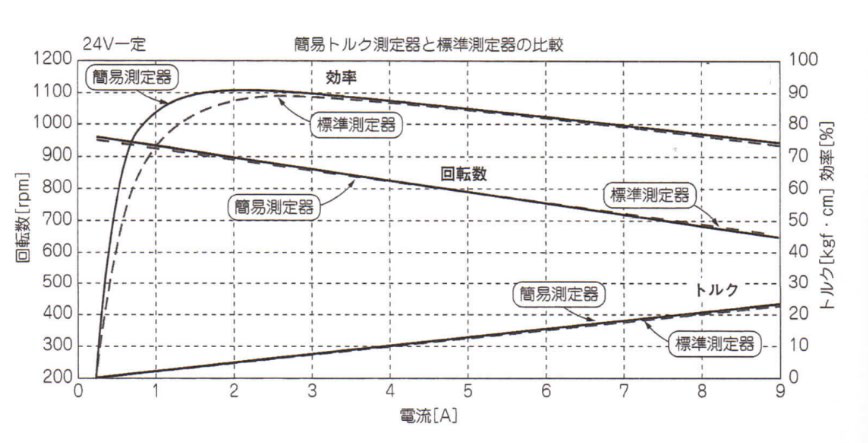
演習 電気2:
モータ巻線抵抗はmΩメータ、モータトルク定数や誘起電圧定数は、以下の特性データから導出する。
演習 電気3:
導出したモータ関連の定数の例
(1)モータ巻線抵抗Ra[Ω]:0.60
(2)モータ巻線インダクタンスLa[mH] :6.0
(3)モータトルク定数KT [Nm/A]:0.245
(4)誘起電圧定数KE[Vs/rad]:0.234
(5)その他の入力情報
・モータ軸換算慣性モーメント[kgm^2] :0.001436
・モータ出力ギアの減速比:3.077
・負荷側エンコーダパルス数:334パルス/回転
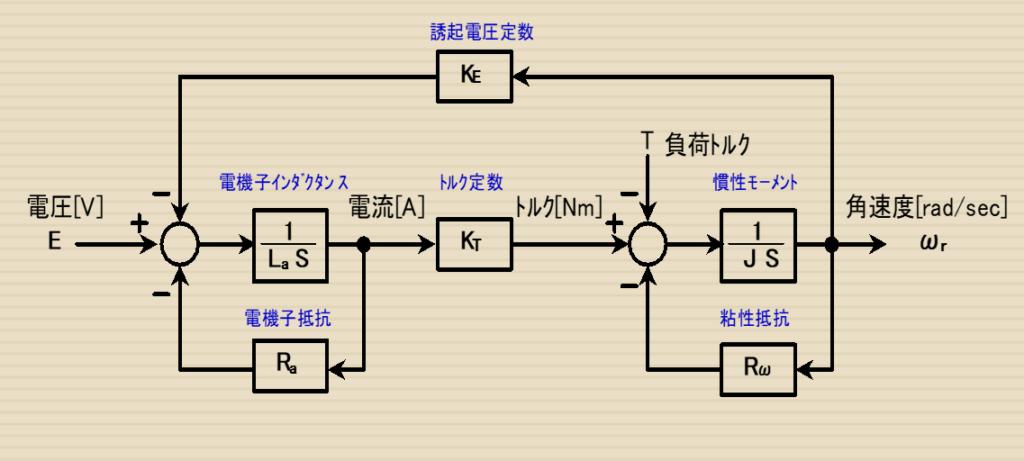
演習 制御1:
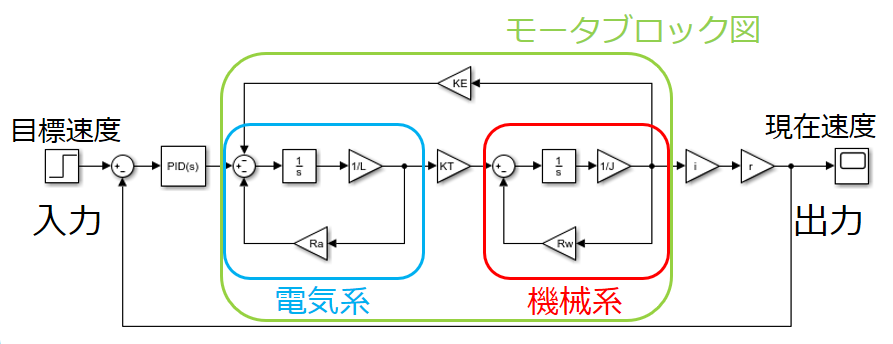
モータ負荷モデル(下図)の数式モデルを作成する。
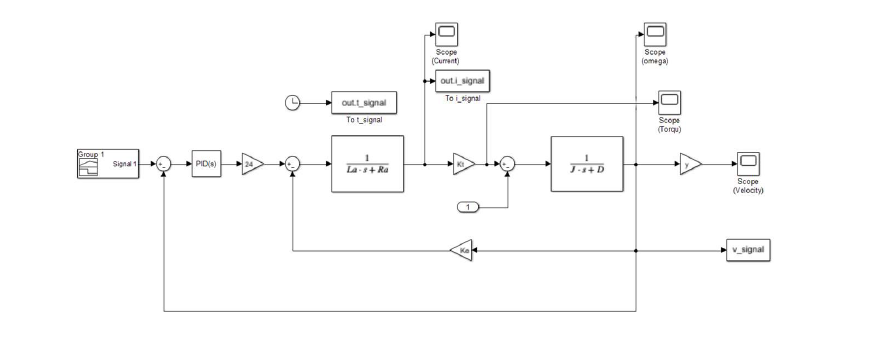
演習 制御2:
MATLABSimulinkを使用して、モータ速度制御系のシミュレーションモデルを作成する。
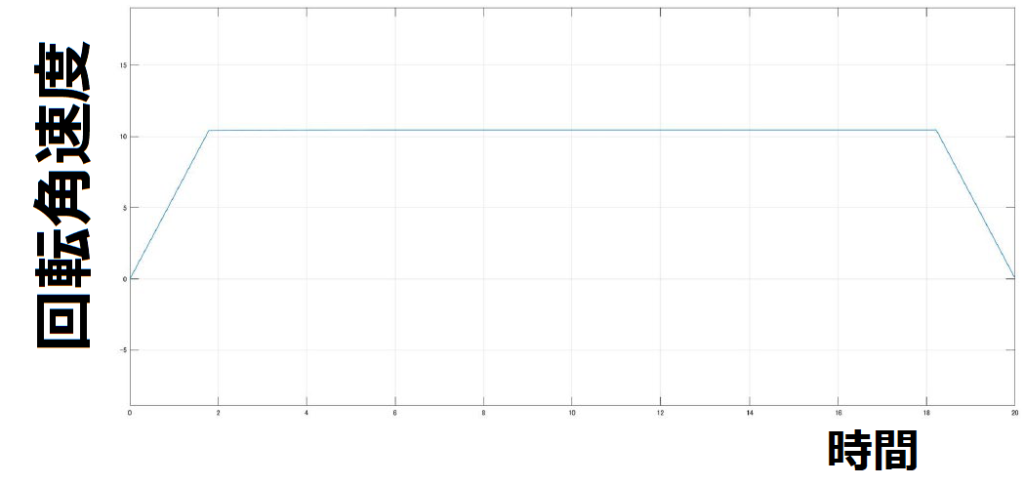
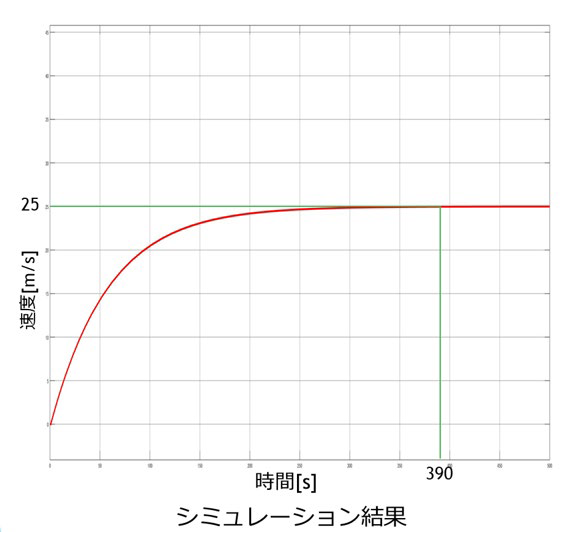
演習 制御3:
作成したモデルを適用し、モータ速度制御系のシミュレーションを行い、回転角速度の予測計算を実施する。
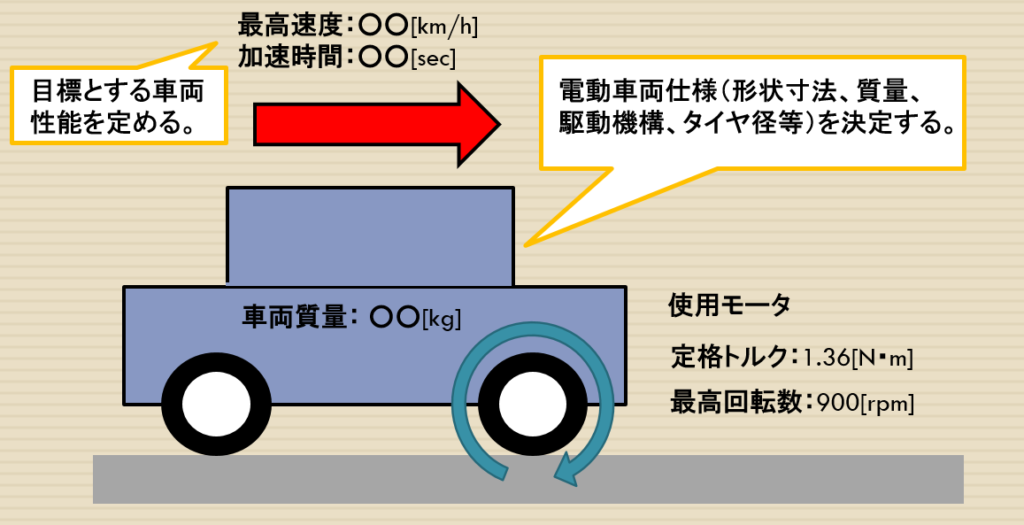
電動車両モデルの基本設計
モータ・インバータキットで駆動することを前提とした電動車両の基本設計を行う。グループごとに構築する電動車両は違う。
数式モデルの作成
MATLABSimulinkを使用した電動車両のシミュレーションモデルを作成する。
シミュレーション
MATLABSimulinkを使用して電動車両速度の計算を行う。
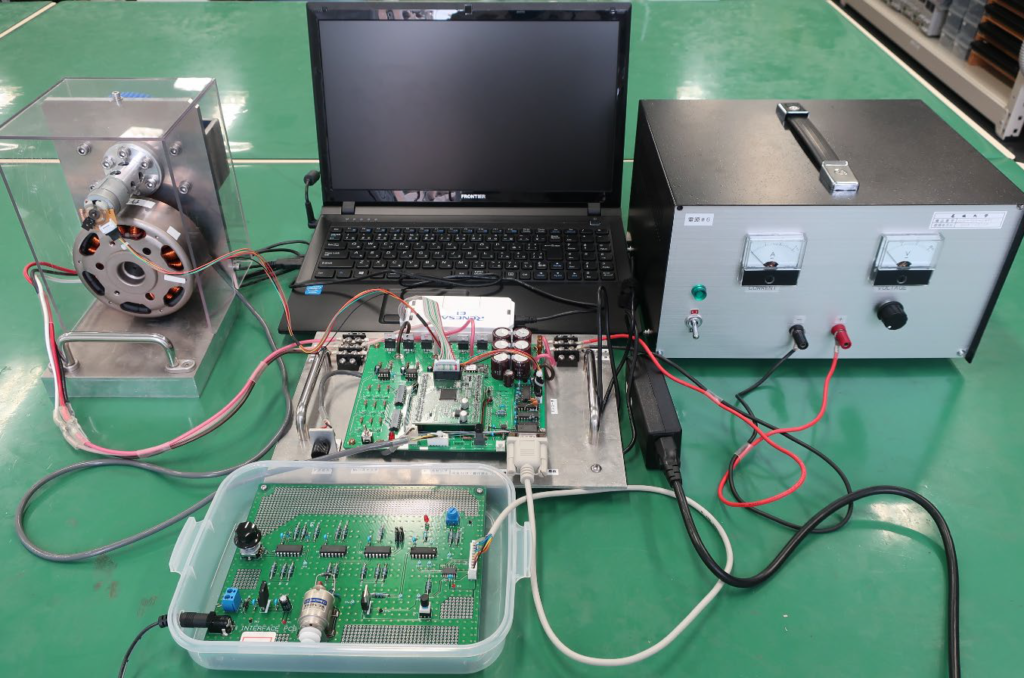
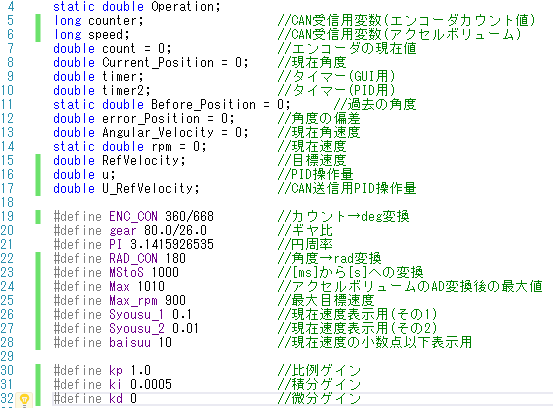
制御ソフトウェア作成
ノートPC、エミュレータ及びCPUボードを使用してモータ速度制御を実現する制御ソフトウエアを作成する。
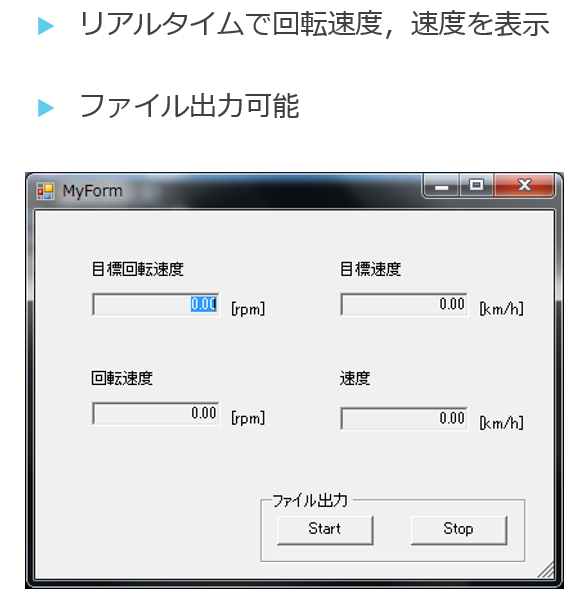
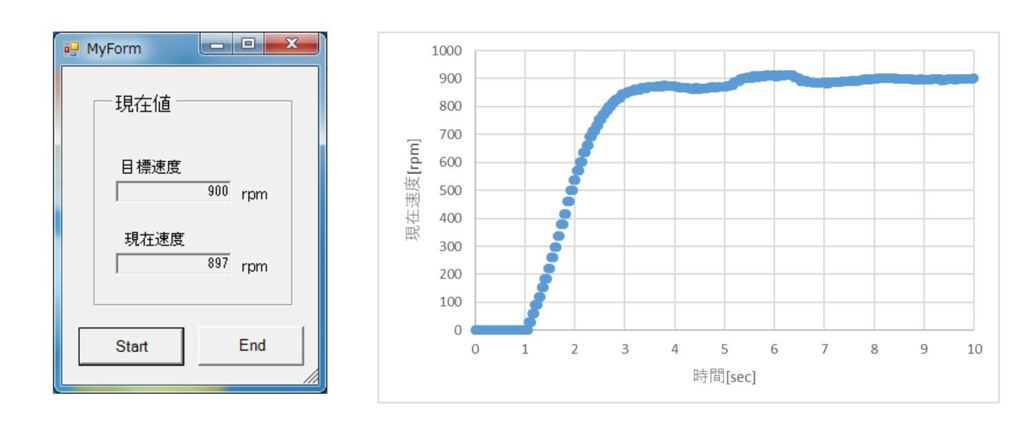
GUIの作成
ノートPCディスプレイ上に速度指令と及び実速度を表示するGUIシステムを構築する。モータコントローラ基板とノートPC間のCAN通信機能を用いる。
実機試験
電動車両を作成するまでは実施せず、ギア付きモータのシミュレーション結果と実測値との検証を踏まえて、構築した電動車両の性能予測を実施して、基本設計に反映させる。
学生の感想や反響
・機械、電気、制御の要素技術からこれらを融合したシステム技術を学ぶことができた。
・役割分担することで効率よく作業に取り組むことができた。
・メンバのそれぞれの得意分野を生かして効率的な作業が実施できた。
・わからないことはインターネットで調べたり、メンバ間で意見を出し合ったり、教員に質問することで理解が深まった。
・実機試験がなかなか思うように進まなかった。本演習で修得したことを、4年次での卒業研究で活かしていきたい。